On this page you can find the software components of Chordata Motion’s mocap framework.
This page contains the legacy software and hardware, prior to our kickstarter campaing. If you have one of our ++ models go to the current downloads page to get the latest versions.
The sources for our files are available at our GitLab’s online repositories so that anyone with a little bit of electronic and/or coding experience can go ahead and dive into the intricacies of our project.
If you are interested in building your Chordata Motion system from scratch you will find information in our wiki. If you have any doubt, please leave us your question at our forum.

[Legacy] Capture samples created with the Chordata system
Several actions in .blend, .fbx, .bvh and .gltf
Software
[Legacy ] Raspbian + Chordata notochord v0.2.0 image
Hub program of the Chordata open source motion capture system included in a Raspbian image ready to be flashed on an SD card
Notochord v0.2.0 Changelog: =================== - Implement new Kalman-based sensor fusion algorithm. - Transmits magnetic error data. - Faster and more robust sensor calibration algorithm implemented in C. - Drop dependency on GNU Octave.
![]()
Chordata Blender client v1.0.0
Blender add-on that allows you to receive and manage the capture inside this powerful 3D manipulation platform. It features a renewed node-based interface which allows great flexibility.
Hardware
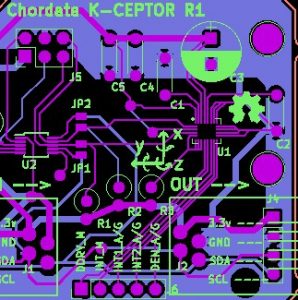
Chordata KCeptor R2.3
Sensing hardware of the Chordata open source motion capture system. KICAD project
Chordata Hub R1.2
Hub hardware of the Chordata open source motion capture system. KICAD project
ChangeLog: =========== K-Ceptor R2.3 - added i2c buffer (TCA9517) - All components as SMD packages (except for RJ11 connectors) - Jumper selectable translation value - Extra footprint for custom translation value - LSM9DS1 extra pins exposed (the K-Ceptor can now be used as a breakout board!) Hub R1.2 -Pull-up resistors on i2c channels on Hub -Fix Hub PCA9548 footprint -Fix Hub gates pin order

Chordata KICAD Libraries
Symbols and footprints used on the Kicad projects.
![]()
BOM
List of components. Updated 2020/01/24
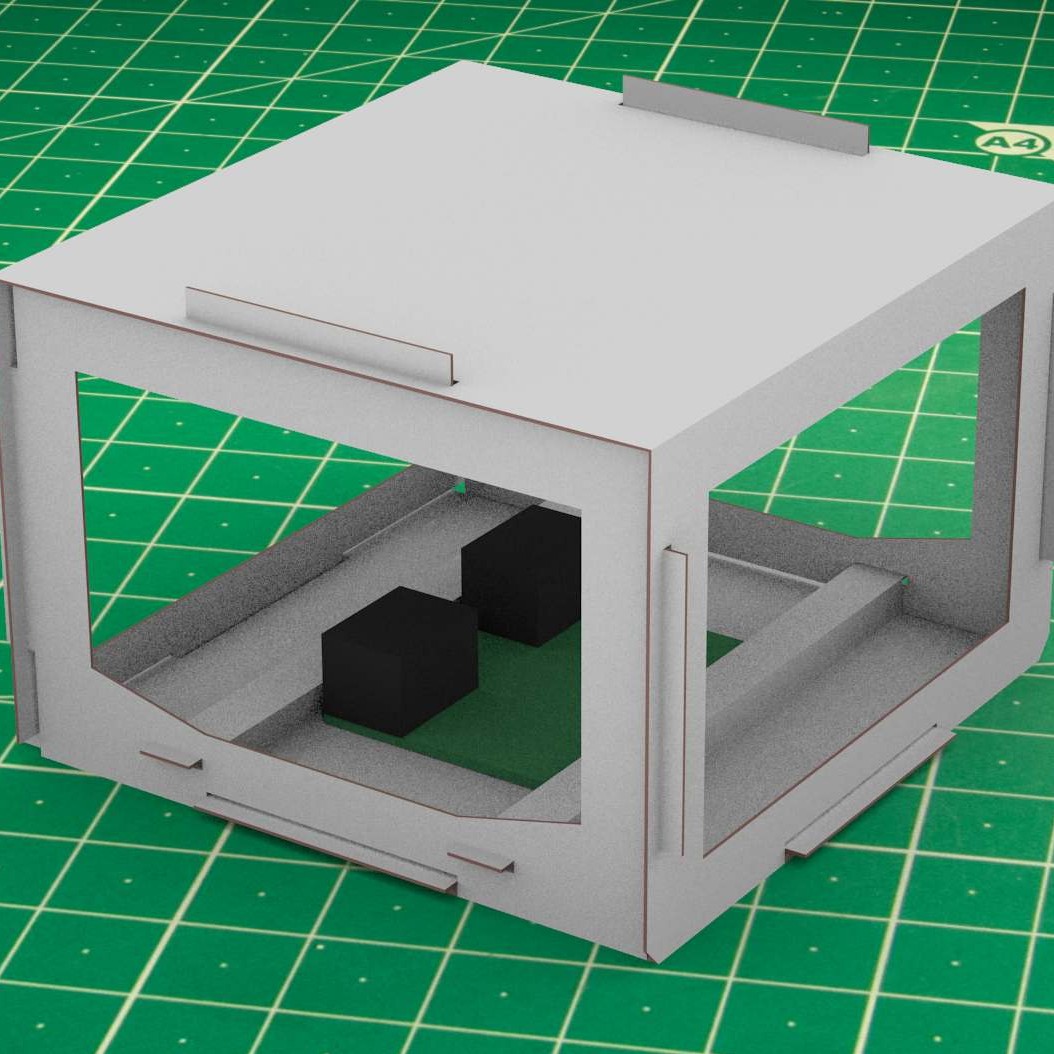
A cardboard box to make the calibration process easier
Deprecated Software
![]()
Chordata_blender_client_v0.1.0b
Blender add-on that allows you to receive, record, and retransmit physical motion capture data coming from a Chordata open source motion capture system
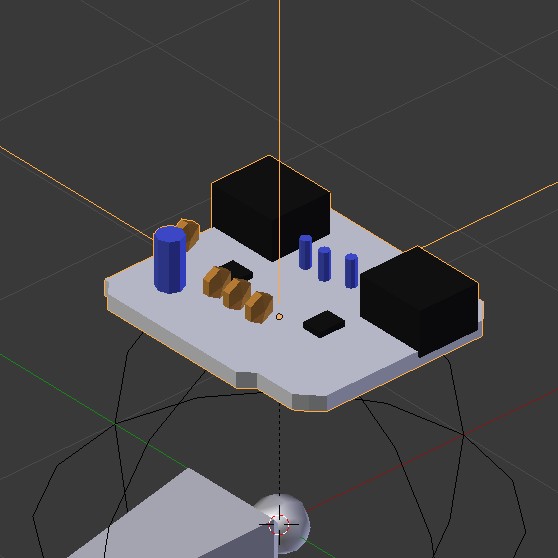
TestCube Blender file
A simple file that allows you to test the sensor calibration on your K-Ceptors
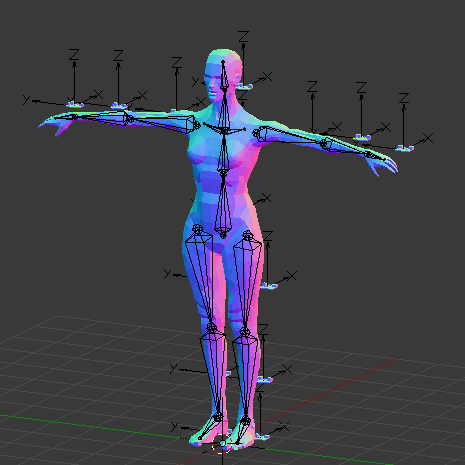
Default Biped configuration with Female Model
A female human figure with an armature to receive and record capture data using the Default biped configuration